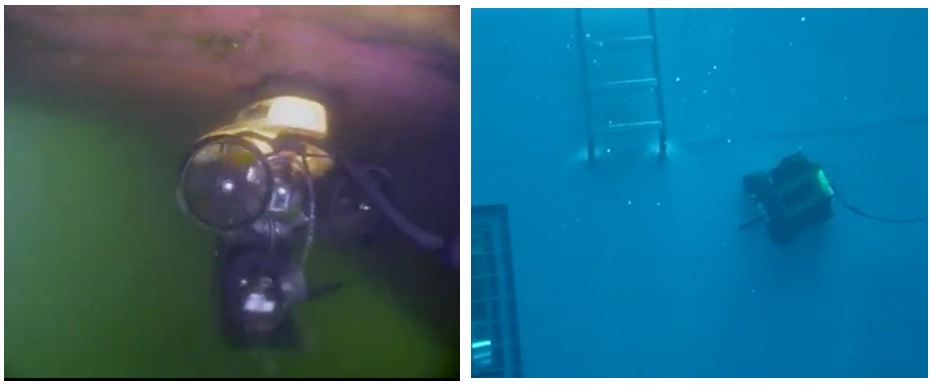
ربات زیردریایی چسبنده به سطوح

در این نوع ربات زیردریایی crawler، هدف اصلی چسبیدن بر روی سطوح افقی و شیب دار می باشد. در نتیجه بر خلاف مدل کف نشین، در این مدل نباید نیروی بویانسی منفی باشد و بهینه ترین حالت طراحی به گونه ای است که نیروی بویانسی صفر باشد تا crawler بتواند با اندکی کمک گرفتن از تراستر عمودی نیروی لازم برای چسبندگی را پیدا کند. در مدل های دیگری که فقط به منظور عملیات تعمیر و نگهداری شناورهای فلزی از جمله کشتی ها استفاده می شود، شنیcrawler دارای مگنت است که بتواند نیروی چسبندگی را ایجاد کند.